11.27.2025 / 6-минутное чтение
Автоматизированная многоэтажная обработка материалов для товаров для дома: AGV и система рециркуляционных подъемников
Проект Обзор
В этом примере подробно описывается автоматизированное решение по перемещению материалов "под ключ", реализованное для ведущего производителя товаров для дома.
Интегрированная система обеспечивает бесперебойную связь между производством и складом на нескольких этажах, используя Подъем заниженного борта AGVs, a Рециркуляционный подъемник, Роликовый конвейер Линии, и стандартизированный ПоддоныВсе они управляются центральной программной платформой.
Столкнувшись с проблемами трудоемкой транспортировки, пространственными ограничениями и необходимостью повышения гибкости процесса, производитель принял это решение для обеспечения круглосуточной автоматизированной работы, повышения безопасности и значительного улучшения внутренняя логистика эффективность.
Основные параметры
Вызов
- Трудоемкие процессы: Использование ручного труда и вилочных погрузчиков для вертикальной транспортировки было неэффективным, дорогостоящим и создавало угрозу безопасности.
- Пространственные ограничения: Существующая планировка не позволяла внедрить стационарные конвейерные системы для транспортировки грузов между этажами без существенных и дорогостоящих структурных изменений.
- Спрос на гибкость: Графики производства и ассортимент продукции часто менялись, поэтому требовалась система перемещения материалов, которая могла бы быстро адаптироваться без значительных простоев или перенастройки.
Рабочий процесс
- AGV Transport & Pickup: Система управления направляет AGV для подъема поддона к месту сбора (например, в конце производственной линии). AGV перемещается к месту, подставляет вилы под ожидающую паллету, поднимает ее и транспортирует к входной станции подъемника. .
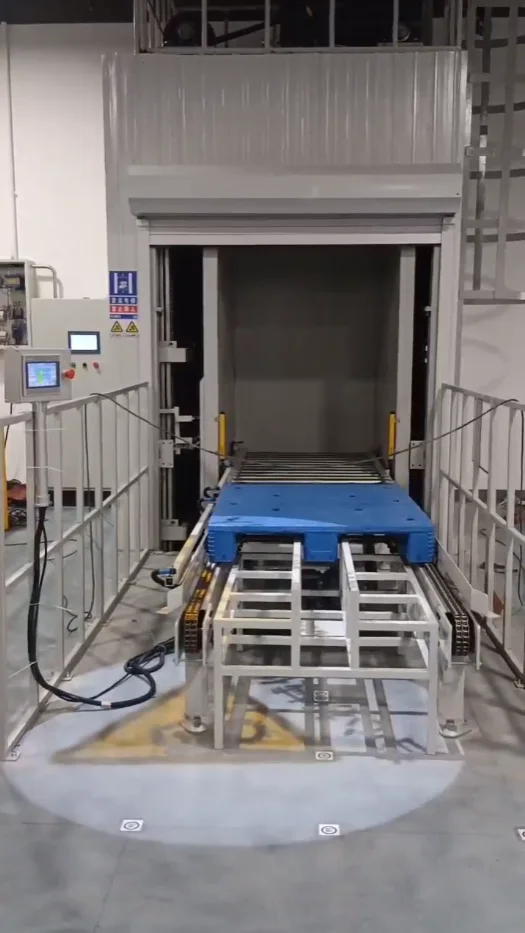
- Точная стыковка и перенос: AGV выравнивается относительно входа в лифт с высокой точностью (±10 мм). Роликовый конвейер на платформе лифта и на станции синхронизируются, втягивая паллету из AGV в кабину лифта. После этого AGV свободен для выполнения следующей задачи.
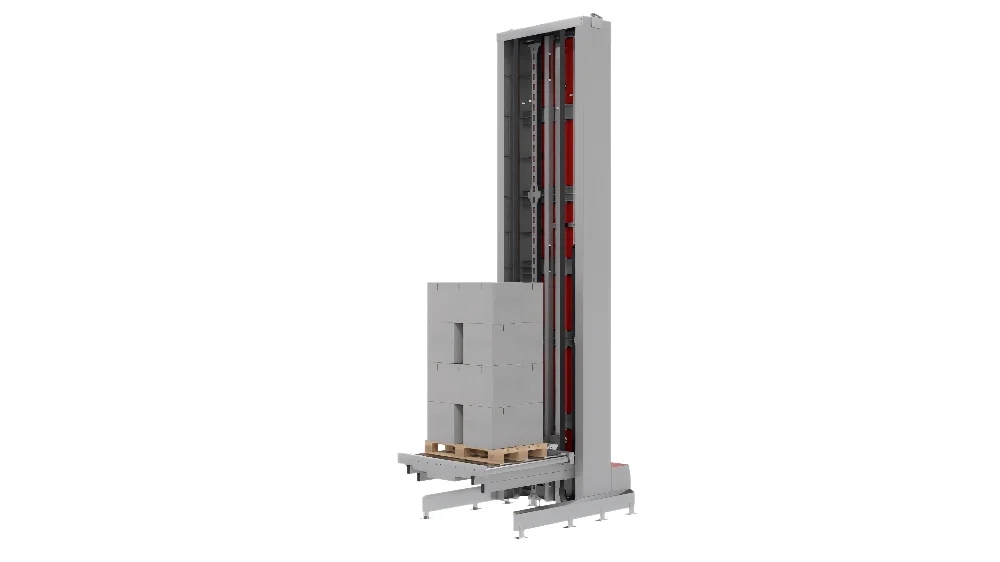
- Вертикальная транспортировка: Когда паллета надежно закреплена внутри, дверь лифта закрывается. Затем возвратно-поступательный лифт вертикально перемещается на заданный целевой этаж (например, на уровень склада), и все это контролируется центральным планировщиком.
- Разгрузка и окончательная доставка: На целевом этаже открывается дверь лифта. К подъемнику пристыковывается другой AGV (или тот же самый, если он запланирован). Рольганги передают паллету на ожидающий AGV, который затем доставляет ее в конечный пункт назначения, например в буфер хранения или в зону отгрузки.
Программная система
- Интеллектуальное управление движением: Эта система отвечает за планирование и диспетчеризацию всех AGV в режиме реального времени, управляя их маршрутами, чтобы избежать столкновений и оптимизировать транспортный поток. .
- Модуль управления подъемником: Интегрирует поршневой подъемник как управляемый ресурс в систему, координируя его перемещения с прибытием и убытием AGV.
- Интеграция с WMS/MES: Платформа легко взаимодействует с управляющим программным обеспечением предприятия (например, MES). Это позволяет системе напрямую получать заказы на транспортировку и в режиме реального времени обновлять информацию о местонахождении материалов, обеспечивая замкнутый поток данных и сквозную видимость. .
Решение
- Подъемные AGV с заниженным бортом: Целый парк этих роботов перемещается по производственным и складским помещениям. Они предназначены для скольжения под стандартными паллетами, установленными на подставках, и подъема их на поршневой подъемник и обратно. .
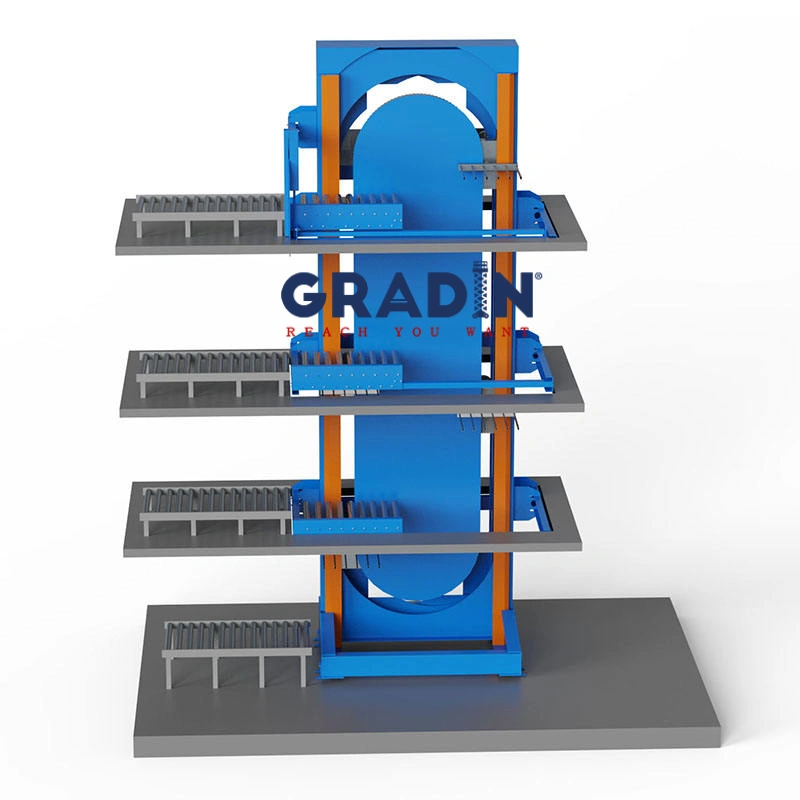
- Рециркуляционный подъемник: Это сверхмощный вертикальный конвейер служит основой системы для перемещения паллет между этажами. Он оснащен встроенной платформой роликового конвейера для плавного перемещения .
- Роликовые конвейерные линии: Они устанавливаются в местах сопряжения с AGV и внутри возвратно-поступательного подъемника, обеспечивая бесконтактную и выровненную передачу паллет.
- Стандартизированные паллеты и интерфейс: Вся система разработана с учетом стандартных размеров и высоты паллет, что обеспечивает совместимость со всеми AGV, лифтыи конвейеры.
- Унифицированная система управления: Центральный Интеллектуальная система управления дорожным движением Система управляет всем процессом. Эта система управляет диспетчеризацией AGV, работой подъемников и взаимодействует с вышестоящими системами предприятия. Склад Система управления (WMS) или система управления производством (MES), создающая полностью интегрированный и прозрачный с точки зрения данных логистический контур .
Подробности