11.24.2025 / 4분 읽기
휴머노이드 로봇 성능을 위한 리지드 체인 리프팅 스테이지
프로젝트 개요
산업: 기술 전시 및 엔터테인먼트
애플리케이션: 로봇 공연 무대 시스템
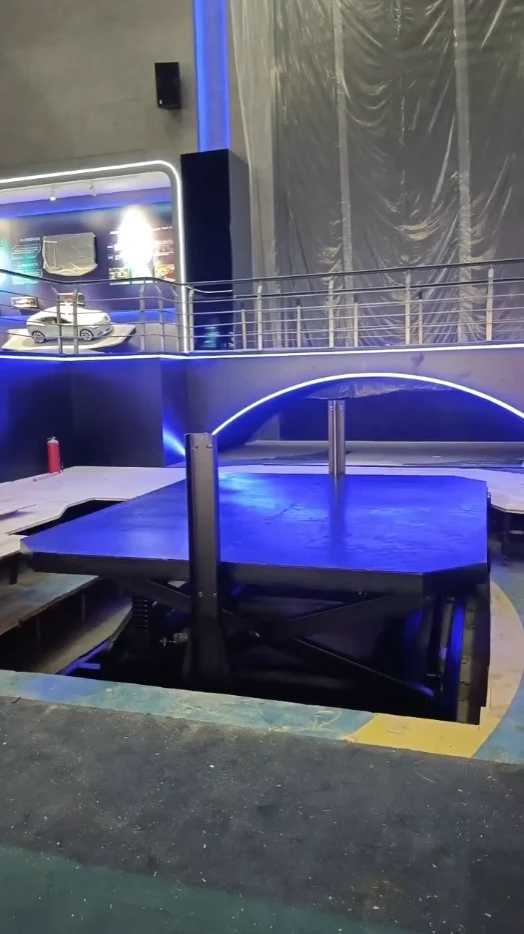
핵심 과제: 휴머노이드 로봇 공연을 위해 특별히 매우 부드럽고 빠른 리프팅 스테이지를 설계해야 하며, 실내 전시를 위해 조용한 작동을 보장하면서 로봇이 상승하는 동안 떨어지지 않도록 절대적인 안정성이 요구됩니다.
기본 매개변수
| 매개변수 | 사양 |
|---|---|
| 무대 크기 | 3450 × 2850 mm |
| 부하 용량 | 500kg |
| 여행 높이 | 1400mm |
| 상승/하강 시간 | ≤ 10초 이하 |
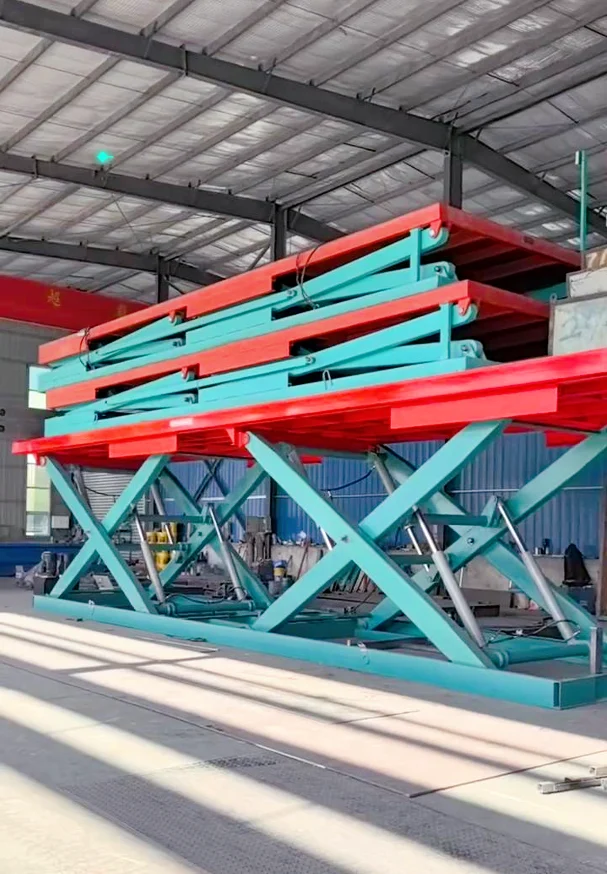
| 드라이브 시스템 | 듀얼 리지드 체인(XCL35R/L-1540/S) |
| 제어 시스템 | 485 및 이더넷 프로토콜을 사용하는 PLC |
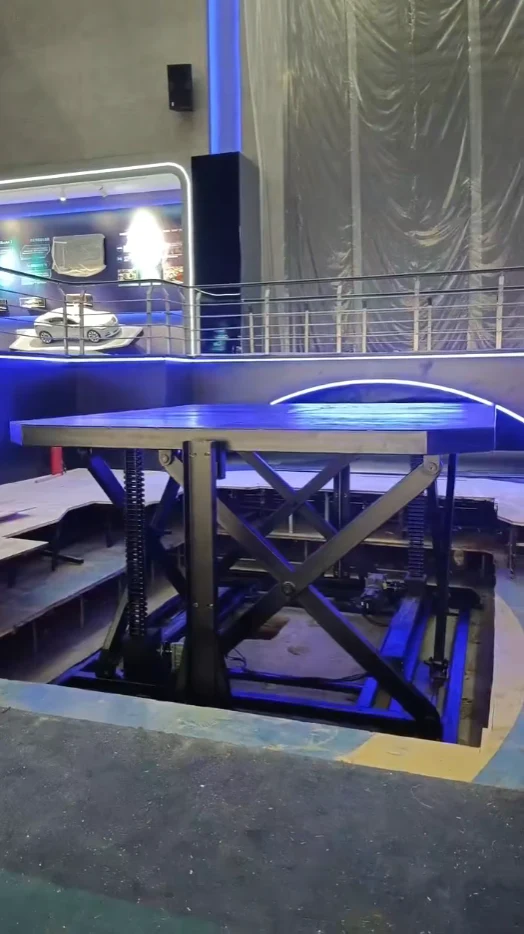
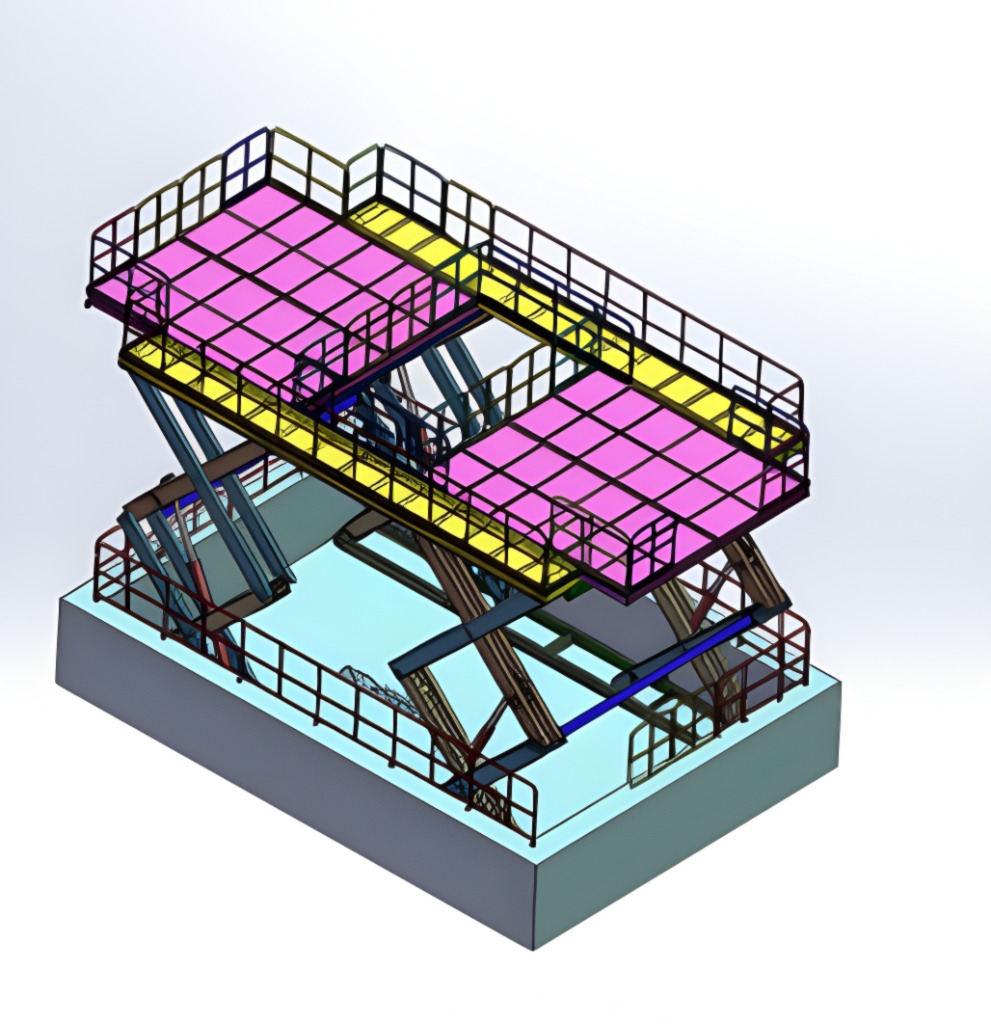
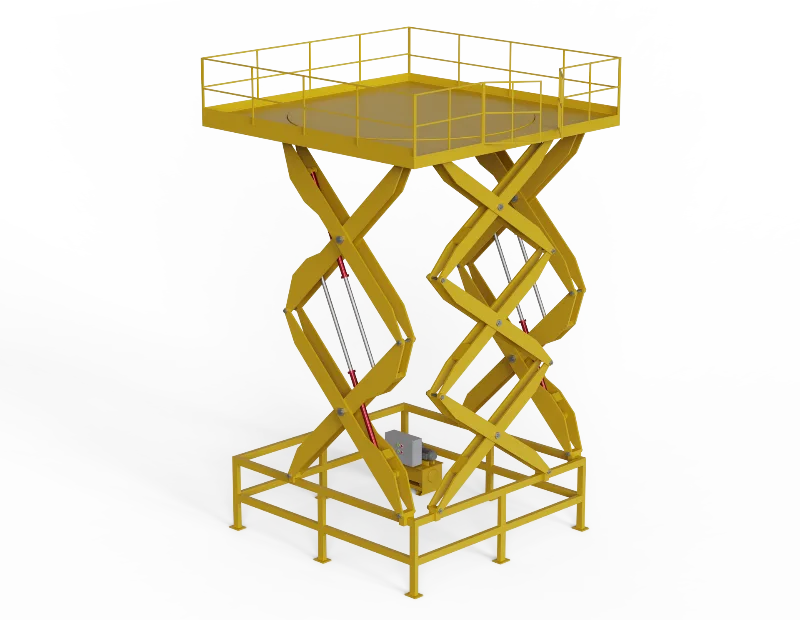
| 구조 설계 | 2체인, 4시저 구성 |
| 접힌 높이 | ≤ 480mm 이하 |
도전 과제
- 중요한 안정성 요구 사항: 이동 중 진동이나 흔들림이 발생하면 35kg의 휴머노이드 로봇이 균형을 잃을 수 있습니다.
- 빠른 장면 전환: 동적 퍼포먼스 효과를 위해 10초 이내에 완전한 고도 변경이 필요합니다.
- 소음 감도: 실내 전시 환경에 적합한 저소음 작동 필요
- 고급 통합: 원활한 쇼 프로그래밍을 위해 필요한 정교한 제어 인터페이스
솔루션
- 절대적인 모션 안정성: 그리고 듀얼 리지드 체인 드라이브 시스템정밀 보조 가이드와 결합하여 기존 스크류 또는 유압식 리프트에서 흔히 볼 수 있는 흔들림이나 진동을 완전히 제거합니다. 따라서 완벽하게 부드러운 전환 를 유지해야 하는데, 이는 휴머노이드 로봇의 균형을 유지하기 위한 기본 요건입니다.
- 신속하면서도 제어된 움직임: 그리고 서보 모터 시스템 는 까다로운 환경에서 완전한 고도 변화를 달성하도록 정밀하게 프로그래밍되었습니다. 10초 기간. 모션 프로파일은 부드러운 가속과 감속을 위해 세심하게 조정되어 로봇 공연자가 불안정해질 수 있는 갑작스러운 움직임을 방지합니다.
- 속삭임-저소음 작동: 활용 초저소음 모터 소음 발생을 최소화하도록 설계된 구동 메커니즘을 통해 무대는 놀랍도록 낮은 데시벨 수준으로 작동합니다. 이는 몰입감 넘치는 분위기 기계 소음이 방해가 될 수 있는 실내 기술 전시회의 경우입니다.
- 고급 제어 통합: 다음에 대한 기본 지원으로 485 및 이더넷 통신 프로토콜무대는 더 큰 규모의 쇼 제어 시스템에 원활하게 통합됩니다. 이를 통해 다음을 수행할 수 있습니다. 정밀한 원격 트리거링조명 및 음악과의 동기화, 복잡하고 자동화된 공연 시퀀스 생성을 지원합니다.
- 공간에 최적화된 로우 프로파일: 혁신적인 2체인, 4시저 구성 는 현저히 낮은 접힌 높이 ≤480mm. 따라서 무대 디자인 및 설치의 유연성을 극대화하여 공간이 부족한 영구 설치 또는 임시 전시회에 이상적입니다.
- 이중화된 안전 및 신뢰성: 그리고 듀얼 체인 설계 는 고유한 수준의 중복성을 제공합니다. 이 시스템은 다음을 위해 설계되었습니다. 고강도 사이클 요구 사항 지속적인 공개 시연을 통해 장기적인 안정성을 보장하고 가동 중단 시간을 최소화합니다.
세부 정보