27.11.2025 / lectura de 6 minutos
Manipulación automatizada de materiales en varias plantas para artículos del hogar: AGV y sistema de elevación alternativo
Proyecto Visión general
Este caso práctico detalla una solución automatizada de manipulación de materiales llave en mano implantada para un fabricante líder de artículos para el hogar.
El sistema integrado conecta a la perfección la producción y el almacenamiento en varias plantas utilizando Elevación por debajo AGVs, a Elevador alternativo, Transportador de rodillos Líneasy normalizado PalésTodo ello gestionado por una plataforma de software central.
Enfrentado a los retos del transporte intensivo en mano de obra, las limitaciones espaciales y la necesidad de una mayor flexibilidad del proceso, el fabricante adoptó esta solución para lograr un funcionamiento automatizado 24/7, aumentar la seguridad y mejorar significativamente intralogística eficacia.
Parámetros básicos
Desafío
- Procesos que requieren mucha mano de obra: La gran dependencia de la mano de obra y las carretillas elevadoras para el transporte vertical era ineficaz, costosa y planteaba riesgos de seguridad.
- Restricciones espaciales: La distribución existente dificultaba la implantación de sistemas fijos de transporte transversal sin modificaciones estructurales importantes y costosas.
- Demanda de flexibilidad: Los programas de producción y las mezclas de productos cambiaban con frecuencia, lo que requería un sistema de manipulación de materiales que pudiera adaptarse rápidamente sin tiempos de inactividad ni reconfiguraciones significativas.
Flujo de trabajo
- Transporte y recogida AGV: El sistema de control envía un vehículo autoguiado de elevación por debajo a un punto de recogida (por ejemplo, al final de la línea de producción). El AGV se desplaza hasta la ubicación, desliza sus horquillas bajo el palé en espera, lo eleva y lo transporta hasta la estación de entrada del elevador alternativo. .
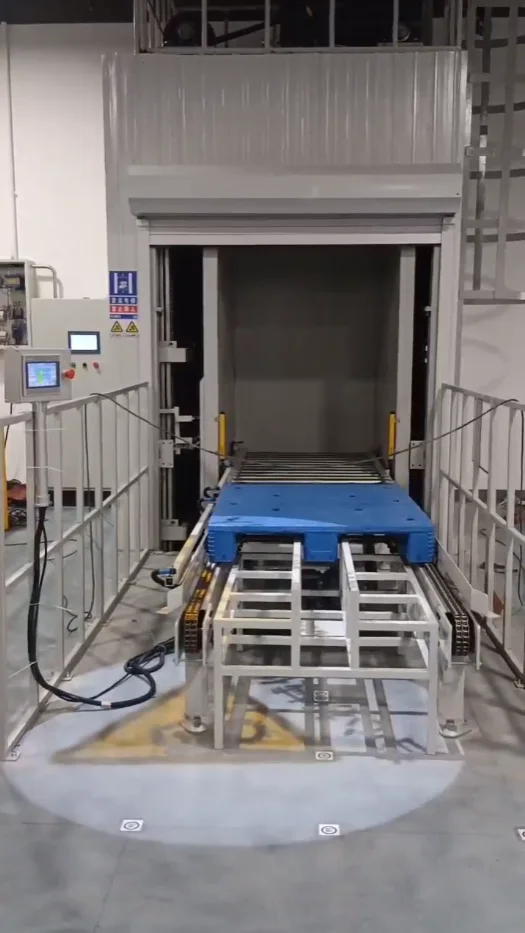
- Acoplamiento y transferencia de precisión: El AGV se alinea con la entrada del ascensor con gran precisión (±10 mm). El transportador de rodillos de la plataforma del ascensor y de la estación se sincronizan, arrastrando el palé desde el AGV hasta la cabina del ascensor. A continuación, el AGV queda libre para ejecutar su siguiente tarea.
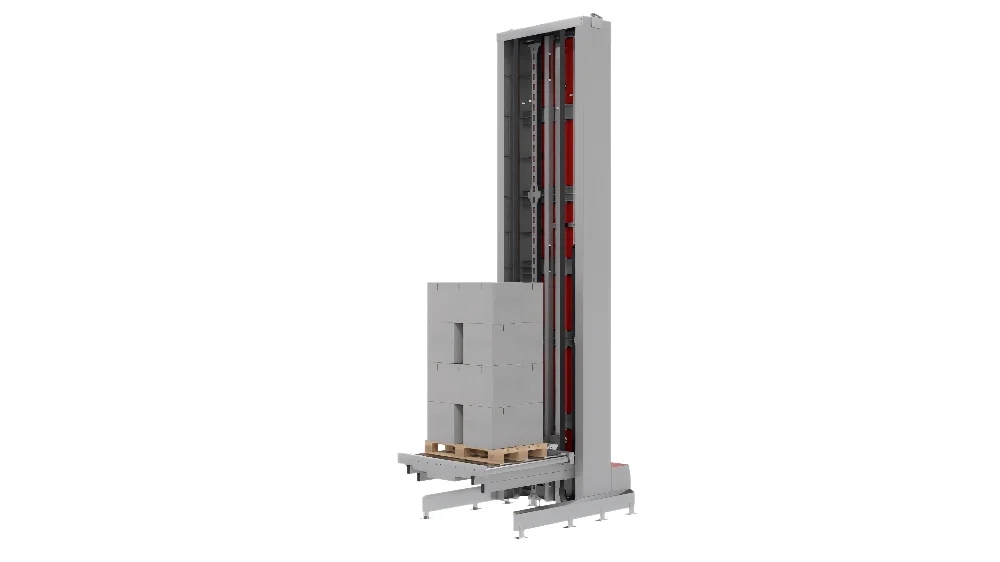
- Transporte vertical: Una vez que el palé está bien sujeto en el interior, la puerta del elevador se cierra. A continuación, el elevador alternativo se desplaza verticalmente hasta la planta de destino designada (por ejemplo, el nivel de almacenamiento), todo ello controlado por el programador central.
- Descarga y entrega final: En la planta de destino, se abre la puerta del ascensor. Otro vehículo AGV de elevación por debajo del suelo (o el mismo, si está programado) se acopla al elevador. Los transportadores de rodillos transfieren el palé al AGV en espera, que lo entrega a su destino final, como un pulmón de almacenamiento o una zona de preparación de envíos.
Sistema informático
- Gestión inteligente del tráfico: Este sistema es responsable de la programación y el envío en tiempo real de todos los vehículos autoguiados, gestionando sus rutas para evitar colisiones y optimizar el flujo de tráfico. .
- Módulo de control de elevación: Integra el elevador alternativo como un recurso gestionado dentro del sistema, coordinando sus movimientos con las llegadas y salidas de los AGV.
- Integración SGA/MES: La plataforma se comunica a la perfección con el software de gestión de la planta (por ejemplo, MES). Esto permite al sistema recibir órdenes de transporte directamente y proporcionar actualizaciones de estado en tiempo real sobre la ubicación del material, lo que permite un flujo de datos de bucle cerrado y visibilidad de extremo a extremo .
Solución
- AGV de elevación por debajo del suelo: Una flota de estos robots recorre las plantas de producción y los almacenes. Están diseñados para deslizarse por debajo y levantar palés estandarizados colocados sobre soportes, transportándolos hacia y desde el elevador alternativo .
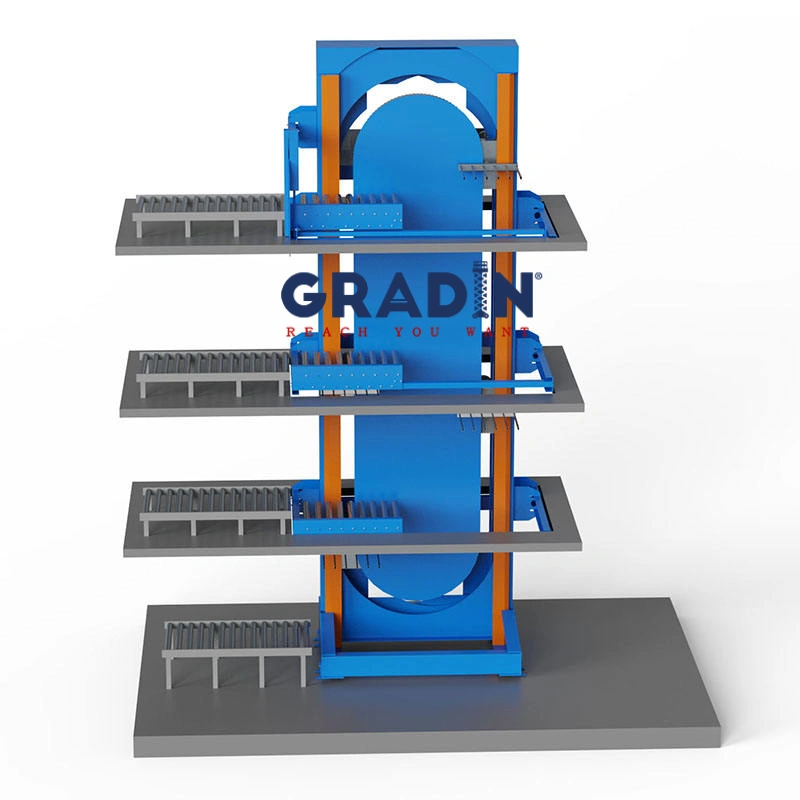
- Elevador alternativo: Este transportador vertical pesado actúa como columna vertebral del sistema para mover palés entre plantas. Cuenta con una plataforma de transportador de rodillos integrada para una transferencia suave .
- Líneas transportadoras de rodillos: Se instalan en los puntos de interfaz con los AGV y dentro del elevador alternativo, garantizando una transferencia de palés alineada y sin fricciones.
- Palés normalizados e interfaz: Todo el sistema está diseñado en torno a tamaños y alturas de palés estandarizados, lo que garantiza la compatibilidad entre todos los AGV, ascensoresy transportadores.
- Sistema de control unificado: Una central Sistema inteligente de gestión del tráfico orquesta todo el proceso. Este sistema gestiona el envío de AGV, el funcionamiento de los ascensores y se comunica con el nivel superior de la planta. Almacén (WMS) o el Sistema de Ejecución de Fabricación (MES), creando un bucle logístico totalmente integrado y transparente en cuanto a los datos. .
Detalles